Teacher Version
Turns
How do we make precise turns with the gyro sensor?
Does the same waitUntil Command block work for left turns?
Try changing your program to turn 90 degrees to the left instead. Try it!
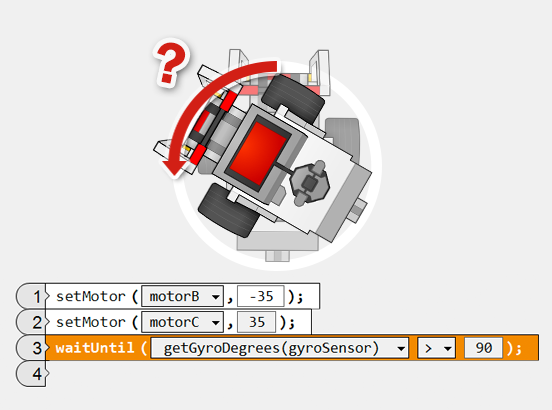
To turn left, the right motor (motorB) should spin forward (positive power), and left motor (motorC) should spin backward (negative power).
What happens?
WARNING: The same block does not work for both left and right turns! Your robot will not stop if you try to use a left turn with the waitUntil block set as it is. You will need to change it to “< -90” because the Gyro sensor will go in the negative direction when turning left.