Teacher Version
Threshold Value
Threshold Values
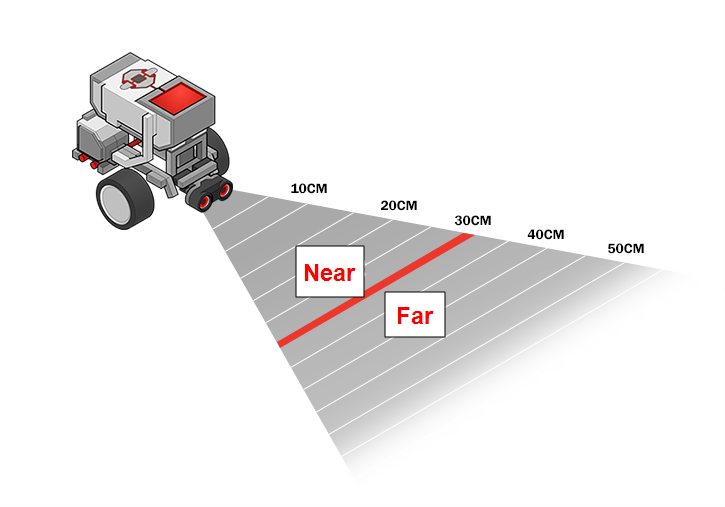
The Wait - Ultrasonic Sensor Block uses a threshold to define what it is waiting for. Rather than look for a specific value (like 1cm or 200cm), it sets a "cutoff" value that divides all the possible Ultrasonic Sensor values into two categories:
- If the distance value is above the threshold, it is considered far
- If the distance value is below the threshold, it is considered near
Setup:
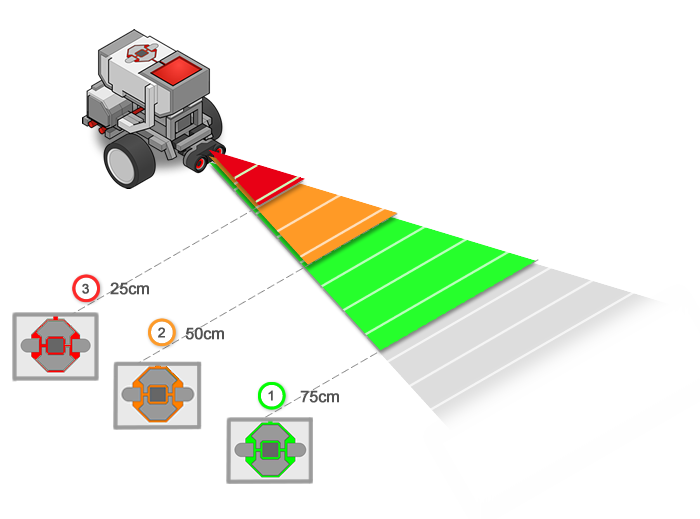
- Place robot facing a wall that is more than 75cm away.
- Write a program that runs toward a wall, and changes the LED color as gets closer:
- Turn the light green until the sensor detects the wall closer than 75cm.
- Then turn the light orange until 50cm.
- Then turn the light red until 25cm.
- Stop when the robot gets closer than 25cm.
Virtual Robot: ThresholdValueVR.rbg
Physical Robot: ThresholdValue.rbg
Quick Tips
Use these hints below to help you to solve the challenge.
- Use multiple waitUntil commands in your program.
- Pause for a couple of seconds after commands for consistency.
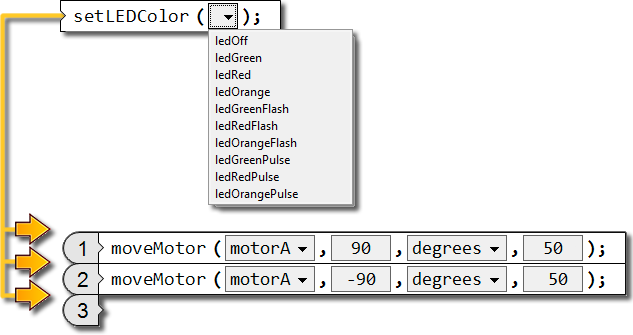
- Can't remember how to use LED Feedback?
- It can be hard to tell which part of your program the robot is running when your programs have multiple steps.
- Add the setLEDColor command to these spots in your program with different colors to visually see how your robot is running your program.