Teacher Version
Backward Until Far
How do we move until far?
In the program shown in the Forward Until Near video, the robot will move forward until it detects a wall or object within the set threshold. Now, perform the opposite. Create a program that makes the robot move backwards from a wall or object until it is beyond the set threshold.
Virtual Robot: MoveUntilFarVR.rbg
Physical Robot: MoveUntilFar.rbg
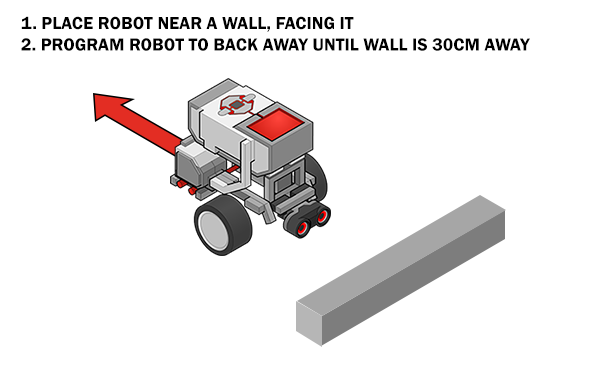
Setup:
- Place the robot with the distance sensor near a wall.
- Program the robot to back away from it until it is 30 cm away.
Quick Tips
Use these hints below to help you solve the challenge.
- Remember that negative motor power makes the robot move backwards.
- The distance will start below the threshold (closer than 30 cm). You will need to back up until the distance is greater than the threshold.